Sharfin Islam

Robotics PhD Student at Columbia Univeristy
sharfin.islam (at) columbia.edu
CV| LinkedIn| Google Scholar| Lab Webpage
About Me
Hello! My name is Sharfin and I am a fifth year doctoral student at Columbia University studying robotics. I am advised by Matei Ciocarlie and work enabling more capable robots through thoughtful, intelligent hardware design. Before my PhD, I worked on design of minimally actuated quasi-passive walkers with Aaron Johnson, Sarah Bergbreiter, and Justin Yim.
Overall, I am interested in the design and control of intelligent, but simple mechanisms that can be deployed in real robotic applications. I enjoy working across the entire spectrum of robotics and automation, where I can leverage my expertise in mechanism design in a full-stack robotic application.
Education
Ph.D., Mechanical Engineering | Columbia University (2021-Present)
M.S., Mechanical Engineering | Columbia University (2022)
B.S., Mechanical Engineering w/ Minor in Robotics | Carnegie Mellon University (2021)
News
[Oct 2025] - Won 1st place at Amazon Robotic’s PhD Communication Competition, where I presented a 5-minute summary of my thesis work!
[Oct 2025] - Presented first version of PopcornFT, a low-cost sensor for robot manipulation, virtually at IROS 2025!
[Sept 2025] - Submitted MiniBEE, a novel bi-manual platform, for publication at ICRA 2026
[June 2025] - Started summer internship at Proception Ai
[May 2025] - Successfully passed my thesis proposal!
[Oct 2024] - Presented paper on hardware/software co-optimization for underactuated tendon transmissions at IROS 2024 in Abu Dhabi!
[Oct 2024] - Presented at the 3rd Workshop on Mobile Manipulation and Embodied Intelligence (MOMA.v3) at IROS 2024
[May 2022] - Presented paper on minimally actuated quasi-passive walker at ICRA 2022! Also featured in IEEE Spectrum
Projects
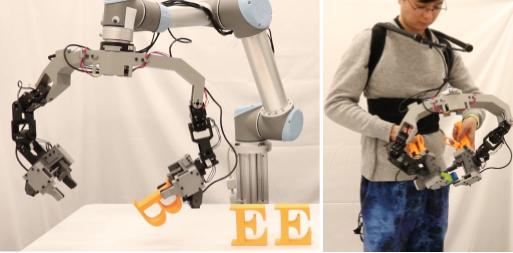
MiniBEE, a novel platform for bi-manual robotic dexterity
We introduce MiniBEE, which is a miniature bi-manual end-effector for compact robotic dexterity. MiniBEE takes a new approach to bi-manual dexterity.
Low-Cost 6-Axis Force/Torque Sensor for Robot Hands
A novel method for six-axis force/torque sensing that allows for finger-size packaging with no amplification electronics, low cost manufacturing, and easy integration into a complete hand.

Multi-Flexor Tendon Transmission Design, Modelling, and Co-Optimization
We first formulate a general model for an underactuated, tendon-driven transmission and then use this model to co-optimize a three-link, two-actuator kinematic chain using reinforcement learning.

Miniature Minimally Actuated Quasi-Passive Walker
By leveraging the passive 3D dynamics, carefully designing the spherical feet, and changing the actuation scheme, we are able to produce a very simple 3D bipedal walking model that has a total of 5 rigid bodies and a single actuator per leg.

Publications
S. Islam^, Z. Chen^, Z. He^, S. Bhatt, A. Permuy, B. Taylor, J. Vickery, Z. Lu, C. Zhang, P. Piacenza, and M. Ciocarlie. “MiniBEE: A New Form Factor for Compact Bimanual Dexterity”, under review (^joint first authorship)
A. El-Azizi^, S. Islam^, P. Piacenza^, I. Kymissis, and M. Ciocarlie. “A Compact, Low-cost Force and Torque Sensor for Robot Fingers with LED-based Displacement Sensing”, IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, October 2025 (^joint first authorship)
S. Islam^, Z. He^, M. Ciocarlie. “Task-Based Design and Policy Co-Optimization for Tendon-driven Underactuated Kinematic Chains”, IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, October 2024 (^joint first authorship)
S. Islam, M. Ciocarlie. “Towards a Miniature Bi-Manual End-effector for Compact Coordinated Robot Dexterity”, 3rd Workshop on Mobile Manipulation and Embodied Intelligence, October 2024
S. Islam^, K. Carter^, J. Yim^, J. Kyle, S. Bergbreiter and A. M. Johnson, “Scalable Minimally Actuated Leg Extension Bipedal Walker Based on 3D Passive Dynamics,” 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, (^joint first authorship)
J. Yim, S. Islam, K. Carter, S. Bergbreiter and A. M. Johnson, “3D Passive Dynamics-inspired Walking Actuated by Open Loop Leg Extension,” 2021 Dynamic Walking Conference
S. Islam, K. Carter, R. St. Pierre, S. Bergbreiter and A. M. Johnson, “Integrating Passive Dynamic Wobbling with Leg Extension to Produce Stable Gaits in a Two-Actuator Bipedal Robot,” 2020 Dynamic Walking Conference
K. Carter, S. Islam, R. St. Pierre, S. Bergbreiter and A. M. Johnson, “Design and Control of a Mesoscale Hip Actuated Powered Walker,” 2020 Dynamic Walking Conference
Page template forked from evanca